기기 정의 파일, 익스트루더 정의 파일을 만들어서 적용을 해야한다.
Creatable D3를 Cura에 적용한 문서
 0 comments 0 comments
0 comments 0 comments NCT 써미스터를 사용하며, 용량은 다음과 같이 계산한다.
이렇게 해서 전체 리스트에서 부품을 찾는다.
참고: https://www.ametherm.com/blog/inrush-current/dc-motor-inrush-current
0 comments Adafruit에서 만든 자료로 Stepper motor에 대해 잘 정리되어 있다.

https://cdn-learn.adafruit.com/downloads/pdf/all-about-stepper-motors.pdf
0 comments 3D 프린팅을 할 때 발생하는 미세 공기 오염물질에 대한 실험 내용. 필라멘트의 재질에 따라 다르며, ABS가 가장 않좋다. 그리고 이에 대한 대책으로 필터를 적용한 프로젝트에 대한 내용들.

관련기사
http://diy3dtech.com/3d-printing-and-air-quality-risks/
0 comments 
Octoprint는 크로스플랫폼을 지원하며, Raspberry Pi를 기본적으로 지원한다. 이 기사에서는 3가지 종류의 Raspberry Pi에서 슬라이싱 테스트를 했는데, 결론은 다음과 같다.
There’s simply no competition between a modern desktop or laptop processor and the comparatively dinky ARM chip used in the Raspberry Pi. Which is why you should really just slice your models on the computer and send the resulting G-Code to OctoPrint over the network. That’s the intended workflow, and it really does make a lot more sense than forcing the Pi to labor over a task it’s clearly not cut out for. If the results of this test have shown anything, it’s that slicing on the Pi is a time consuming process no matter which model you buy.
즉 슬라이싱은 PC에서하고, Octoprint는 Gcode를 네트워크로 전달하는 역할만 하도록…
0 comments

0 comments 

0 comments 
https://www.thingiverse.com/thing:1264391
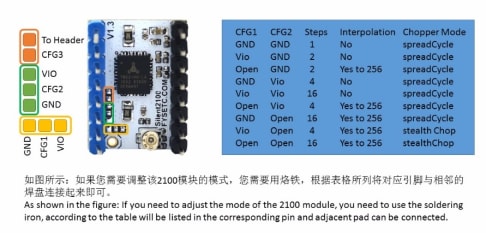
0 comments 0 comments TMC2100 스텝 모터드라이버는 다음과 같은 특징이 있다. 특히 stealthChop이라는 기능으로 모터의 소음을 줄여준다.
FEATURES AND BENEFITS
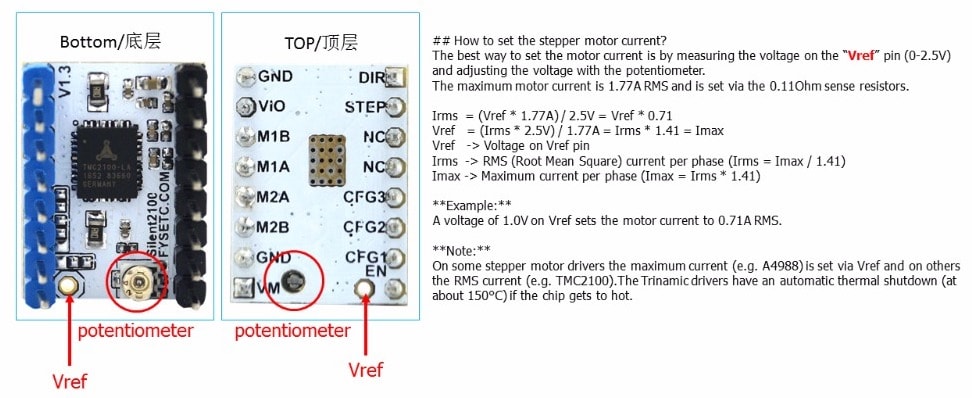
Formulas for calculating the values:
Irms = (Vref * 1.77A) / 2.5V
Irms = Vref * 0.71
Imax = 1.41 * Irms
Vref = (Irms * 2.5V) / 1.77A
Vref = Irms * 1.41
Vref = Imax
Example: A voltage of 1.0V at the VREF pin sets the motor current to 0,71A Irms / 1A Imax.
Vref = (Irms * 2.5V) / 1.77A
1V = (0,71A * 2.5V) / 1.77A
모듈의 경우 제조사마다 연결이 조금씩 다를 수있으니 제조사의 가이드를 확인해야 함