ESP32 가 빌드는 되는데 flashing이 다음과 같은 에러메시지로 안되는 경우
Traceback (most recent call last):
File “esptool.py”, line 57, in <module>
File “/Library/Python/2.7/site-packages/PyInstaller/loader/pyimod03_importers.py”, line 389, in load_module
File “serial/tools/list_ports.py”, line 29, in <module>
File “/Library/Python/2.7/site-packages/PyInstaller/loader/pyimod03_importers.py”, line 389, in load_module
File “serial/tools/list_ports_posix.py”, line 31, in <module>
File “/Library/Python/2.7/site-packages/PyInstaller/loader/pyimod03_importers.py”, line 389, in load_module
File “serial/tools/list_ports_osx.py”, line 32, in <module>
ValueError: dlsym(RTLD_DEFAULT, kIOMasterPortDefault): symbol not found
Failed to execute script esptool
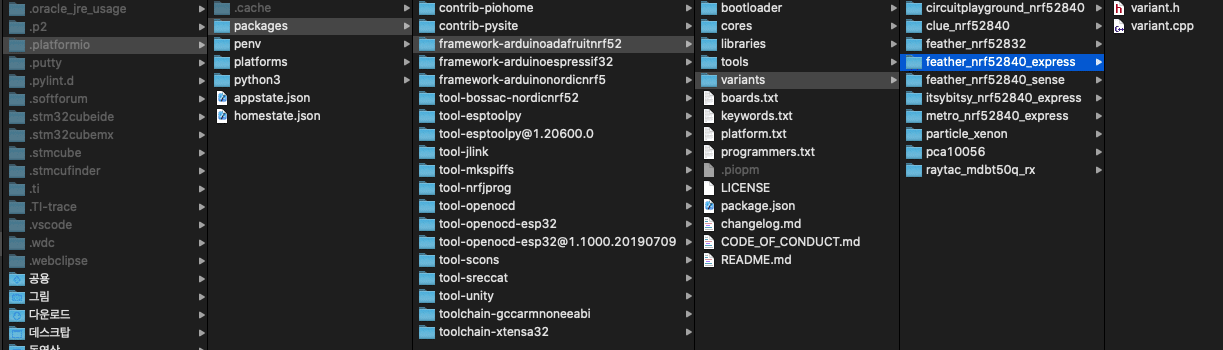
기존 esptool을 esptool.py로 다음과 같이 변경을 하면 해결이 된다.
copy /Users/XXXXX/Library/Arduino15/packages/esp32/hardware/esp32/1.0.4/tools/esptool.py
to /Users/XXXXX/Library/Arduino15/packages/esp32/tools/esptool_py/2.6.1/esptool.pychmod +x esptool.py
그리고 /Users/XXXXX/Library/Arduino15/packages/esp32/hardware/esp32/1.0.4/platform.txt 파일을 열어서 다음과 같이 수정한다.
tools.esptool_py.cmd=esptool -> tools.esptool_py.cmd=esptool.py
platform.txt 파일을 수정하고 Arduino를 재시작