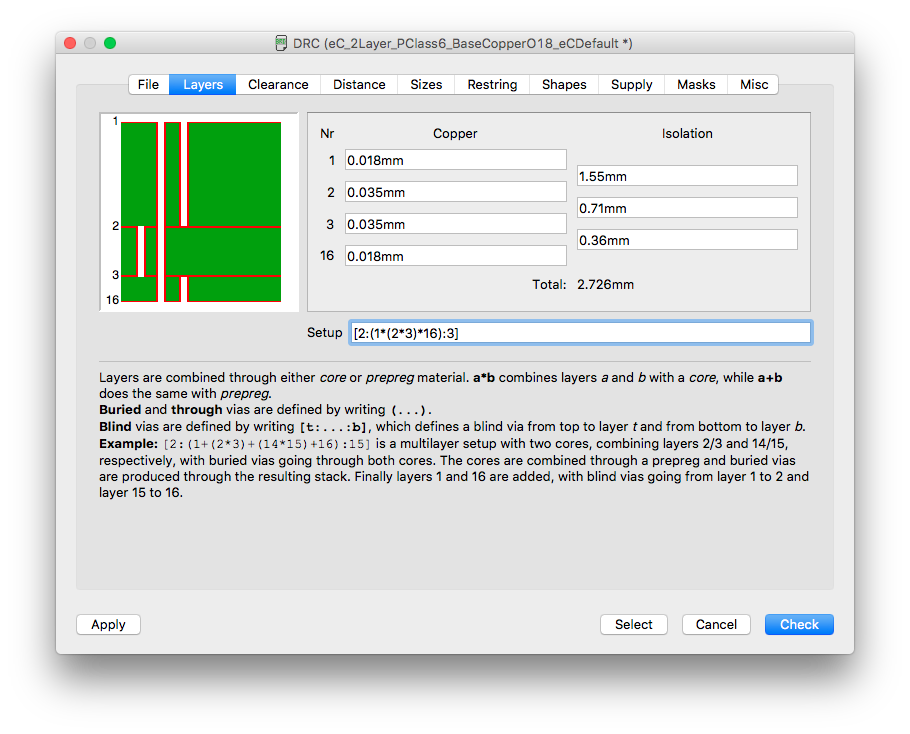
Eagle CAD는 기본이 2층이라서 4층이상의 PCB설계시 설정변경이 필요하다. 아래그림과 같이 DRC메뉴의 Layers에서 Setup항목의 설정을 (1*16)에서 [2:(1*(2*3)*16):3]으로 변경을 한다. 그러면 레이어가 추가가 된다.
 0 comments
0 comments Eagle CAD는 기본이 2층이라서 4층이상의 PCB설계시 설정변경이 필요하다. 아래그림과 같이 DRC메뉴의 Layers에서 Setup항목의 설정을 (1*16)에서 [2:(1*(2*3)*16):3]으로 변경을 한다. 그러면 레이어가 추가가 된다.
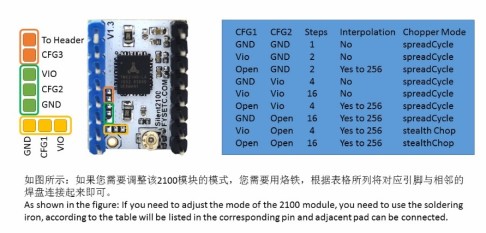
0 comments TMC2100 스텝 모터드라이버는 다음과 같은 특징이 있다. 특히 stealthChop이라는 기능으로 모터의 소음을 줄여준다.
FEATURES AND BENEFITS
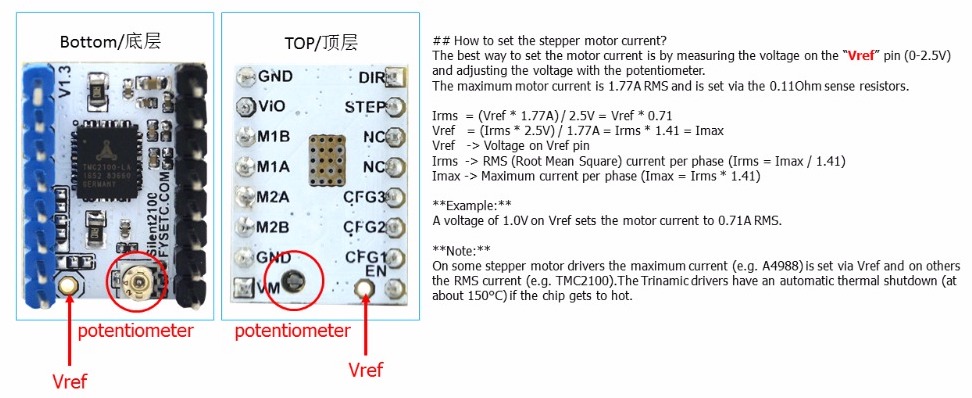
Formulas for calculating the values:
Irms = (Vref * 1.77A) / 2.5V
Irms = Vref * 0.71
Imax = 1.41 * Irms
Vref = (Irms * 2.5V) / 1.77A
Vref = Irms * 1.41
Vref = Imax
Example: A voltage of 1.0V at the VREF pin sets the motor current to 0,71A Irms / 1A Imax.
Vref = (Irms * 2.5V) / 1.77A
1V = (0,71A * 2.5V) / 1.77A
모듈의 경우 제조사마다 연결이 조금씩 다를 수있으니 제조사의 가이드를 확인해야 함
0 comments USB device를 가진 MCU를 PC에 연결시 Mass Storage Device로 동작시키고, Hex파일을 copy하면 MCU의 application code가 업데이트 되는 형태.
0 comments 
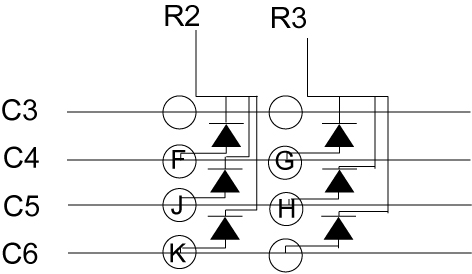
0 comments 키보드의 각 키는 스위치이고 이것의 입력을 받아서 처리하는 MCU는 I/O에 이 스위치가 연결된다. 하지만 모든 키에 I/O를 할당하기 위해서는 키보드의 갯수 만큼 I/O필요하므로 효율적이지 않다. 따라서 키보드 메트릭스 라는 것을 사용한다. 간단히 설명하면 MCU의 I/O에 여러개의 키를 연결하고 주기적으로 키를 스캔하는 방식이다.
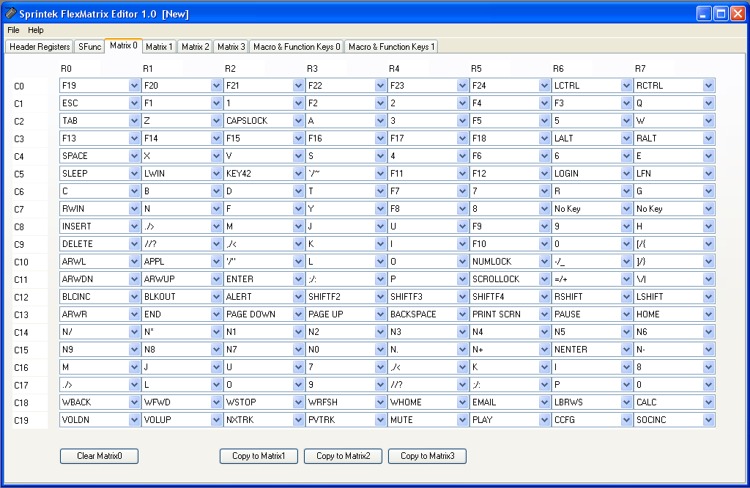
위 그림에서 Row R0~R7은 MCU의 입력으로 주기적으로 스캔이되고, Column C0~C19까지는 MCU의 출력으로 5V에 연결이 되어 있다.
키보드 고스트 현상은 여러개의 키가 눌려질때 어떤키가 인식이 안되거나 다른 키가 눌린것으로 인식이 되는 것이다. 아래 마이크로소프트 사이트에서 확인이 가능하다.
아래 그림의 경우 1) a와 c 키가 동시에 눌린경우는 각각의 키가 인식이 된다. 하지만 a, c, b가 같이 눌리는 경우, 보라색의 도통경로가 형성이 되어 d키도 눌린 것으로 인식이 된다. 이런 현상을 방지하기 위해 다이오드가 필요하다.
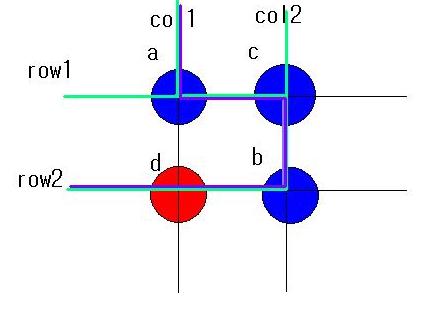
다음 그림과 같이 각 키에 다이오드를 연결하는데, 스캔 방향이 순방향이 되게 연결을 한다.
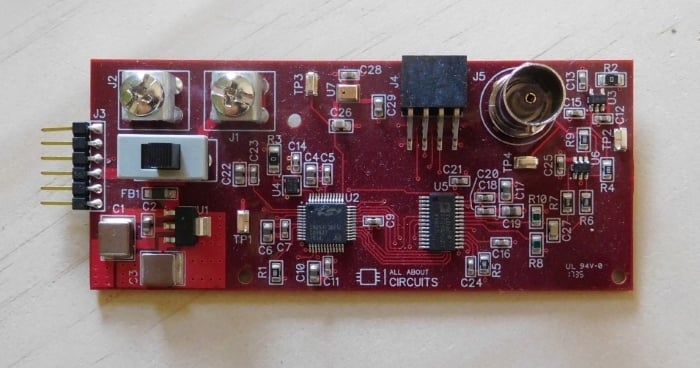
0 comments 0 comments 인덕티브 센서 칩인 TI사의 LDC0851 을 사용한 Tamper detection 응용. 도어가 열리면 인덕턴스 값이 바뀌어 검출이 된다.

참고: https://www.allaboutcircuits.com/projects/tamper-detection-with-inductive-sensing/
0 comments IoT 분야는 한가지 킬러앱이 존재하지 않는다. 즉 특정한 고객의 특정한 분야의 특정한 문제를 해결해야 하며, 버티컬 마켓이다. 따라서
사용자의 니즈를 확실히 이해해서 가치를 제공해야 하며
IoT를 이용하여 “실시간 데이터를 수집, 처리해서 better, faster, cheaper 한 방법”으로 문제를 해결해야 한다.
참고: https://www.iotcentral.io/blog/why-there-s-no-killer-app-for-iot
0 comments 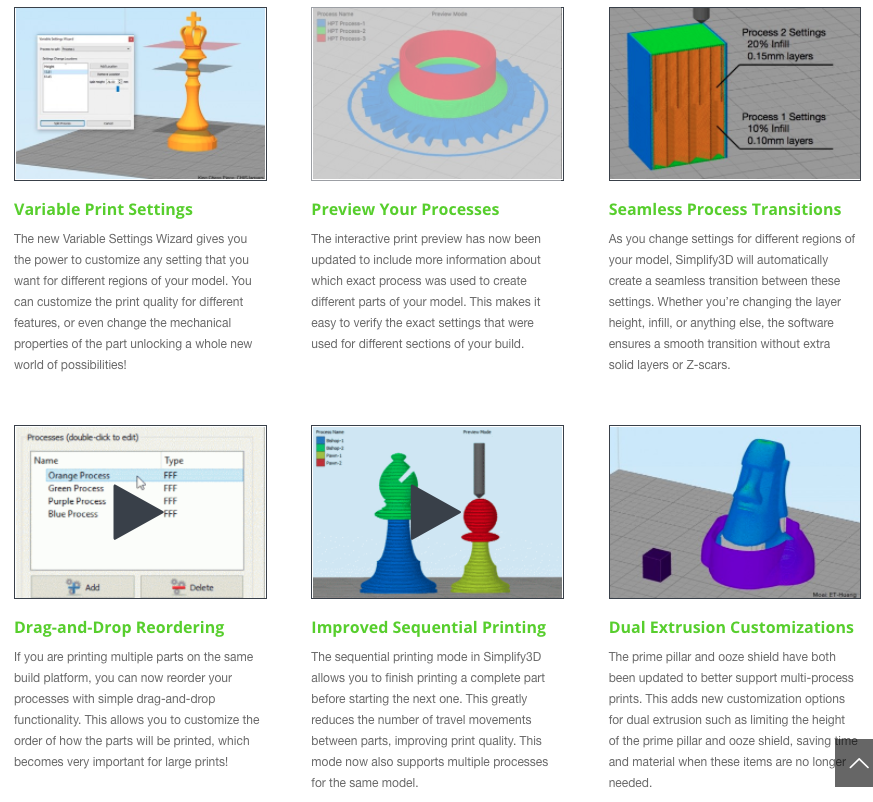

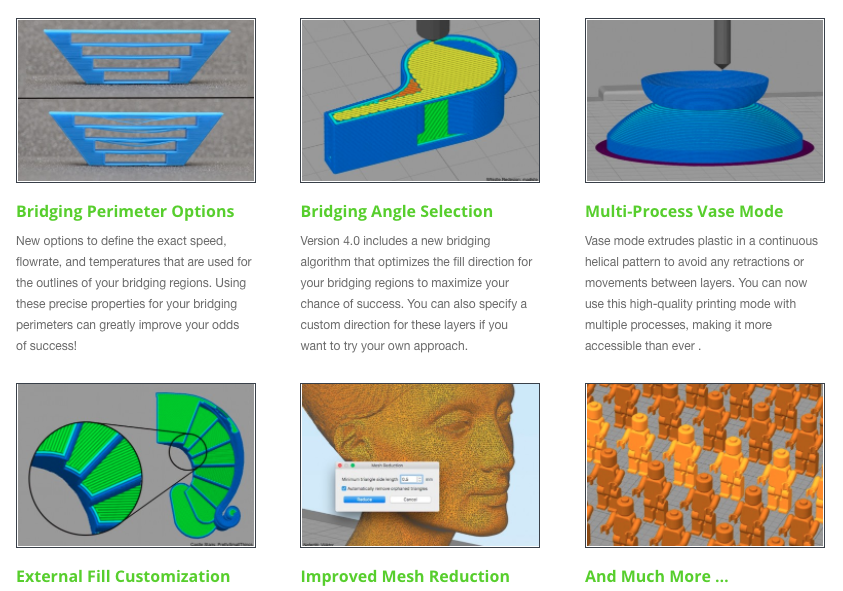
https://www.simplify3d.com/software/release-notes/version-4-0-0/
0 comments 3D프린팅을 위해서 SD 메모리를 사용하거나, USB 케이블을 연결해서 프린팅을 한다. 하지만 USB 케이블을 사용하면, 장시간 프린팅시 1대의 PC가 프린팅만을 위해 사용될 수 밖에 없다. 무선으로 프린팅시 다음과 같은 장점이 있다.
그리고 이 USB케이블을 사용하지 않고 무선으로 프린팅을 하기위해 OctoPrint, AstroPrint, Repetier Server등의 Host 프로그램이 필요하다.
이 세가지 제품을 각각 Linux, Mac, Windows에 비교. 😉
http://3dprinterpower.com/index.php/best-3d-printer-wireless-host-software/